|
|
|
| Home
> Solutions >
Advantages of Hydraulic Robot |
| Advantages of Hydraulic Robot |
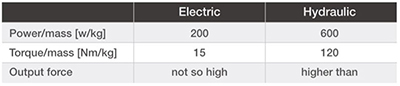
Hydraulic robot is useful for Dynamic, High power, High torque systems.

* Design methodology and case studies in actuator selection, Mechanism and Machine Theory 46, 2011
아무 제한 없이 다양한 디자인, 높은 가반하중 및 광범위한 작업영역을 유연하게 처리할 수 있는 시스템
유압 액추에이터 및 부품은 제한이 없으며 광범위한 설계, 가반하중 및 작업 공간을 유연하게 처리할 수 있는 반면, 전기구동 시스템은 크기 대비 가반하중 비율에 제한이 있고, 가반하중이 일반적으로 크기에 비례합니다.
KNR의 유압 액추에이터는 하모닉 기어가 결합된 표준 모터 보다 10배 이상의 뛰어난 중량 대비 힘을 가지고 있기 때문에 고중량을 다루는 로봇에 적합합니다.
열악한 환경에 적용할 수 있는 최적의 시스템
유압 시스템은 수중, 고온 등의 사람이 접근할 수 없는 위험한 환경에 적합합니다.
액추에이터의 용량에 관계없이 소형 제어기를 적용할 수 있는 시스템
Hydraulic System은 고정밀 제어가 가능하며, Electric driven motors에 비교하여 제어시스템이 현저하게 작고 용량에 관계없이 작은 제품을 적용할 수 있습니다. 전원 및 신호라인 또한 액추에이터의 용량에 관계없이 작고 단순한 구성이 가능하여, 특히 Manipulator 또는 Walking Robot과 같은 다축 또는 다관절 로봇(Multi Axis or Articulated Robot) 적용에 유리합니다.
고속 및 고주파 응답 성능에 적합한 시스템
KNR의 유압서보밸브를 적용한 로봇 구동 요소는 수십 Hz에서 최고 150Hz의 속도 및 주파수 응답 성능을 가지며, 이것은 로봇에 적용하기에 충분한 범위입니다.
|
|
|
Untitled Document
| R&D Center |
|
 |
|
|

